可穿戴与可植入设备是人体运动监控、健康监控以及人机交互等技术的基础,在智慧医疗和智能机器人等万亿级产业上具有巨大的应用前景,其发展趋势是柔性化,乃至弹性化以及多功能化,发展柔性乃至弹性磁电功能材料与器件是核心与关键。然而,一般来说磁电功能材料多为金属或氧化物等无机材料,其柔韧性差;柔性或弹性材料多为高分子材料,通常不具备磁电功能。如何将磁电功能材料柔性化或弹性化,或者将柔性或弹性材料功能化是该领域的一大挑战。为此,中科院磁性材料与器件重点实验室磁电子材料与器件团队围绕导电和磁性等功能材料的柔性化和弹性化开展研究工作,在柔性和弹性磁电功能材料、导体与传感器等方面取得了系列进展。
(一)大应变的弹性导电材料和弹性加热器件
可拉伸导电材料通常是将纳米或微米量级的导电填料(石墨烯、碳纳米管、金属纳米线/纳米颗粒等)掺入到弹性聚合物中,通过分散复合或层积复合等方法处理后得到的具有导电功能的多相复合体系。由于固态导电填料与弹性基体的弹性模量相差很大(约100万倍),大应变时构成导电通路的填料颗粒间隙会发生明显变化,造成导电性能不稳定;此外,固态导电填料的大量引入会提高导电材料的导电性,同时也会恶化其弹性,导致掺杂量有限,因此它的导电性一般较差。如何获得兼容高电导率、拉伸稳定性和大应变的弹性导体仍是一项挑战。
为解决上述问题,博士生郁哲、尚杰研究员和李润伟研究员等采用液态金属作为导电填料,同时在导体内构建“葫芦串”状导电网络结构来释放应变,进一步提高它的应变稳定性。结果表明,该可拉伸导电材料的导电性能够达到导体范畴(大于1000S/cm),并可以实现超过1000%的拉伸,更为重要的是,拉伸100%时电阻的波动小于4%,比传统可拉伸导电材料电阻的变化率降低了2-3个量级,实现了可拉伸导体大应变下的稳定性。如图1a所示。该成果以底封面文章发表在了Advanced Electronic Materials(Adv. Electron. Mater. 2018, 4, 1800137)上。进一步,采用上述可拉伸导电材料作为墨水,搭建了直写式打印机,实现了此材料在弹性基底上的直接打印和图案化设计,如图1b所示,设计打印出的弹性加热器件,具有良好的热稳定性。该项工作为柔性可穿戴电子器件制备提供了新的材料和技术。该成果发表在了Advanced Materials Technologies(Adv. Mater. Technol. 2018, 3, 1800435)上。
(二)绿色环保的可回收柔性纸基电路
柔性电路是一种创建在柔性基板上的特殊电路。目前其应用还存在着两大挑战:一是疲劳特性差,多次循环应变下易断裂失效;二是不能循环利用,传统焚烧、酸洗等回收方式污染环境。针对上述挑战,博士生李法利、刘宜伟副研究员和李润伟研究员等在纸上制备了液态金属基柔性电路,替代传统的铜、铝、银等电路,不仅解决了其弯折疲劳性差的问题,而且可回收(图2为用回收前后的液态金属制备的电路),实现了纸基电路在制造、使用、回收等全生命周期的绿色化。电路线宽在10μm-200μm间可调,且通过多达10000次的对折测试发现,该电路电阻的最大变化率仅为4%,具有很好的应变稳定性。此外,该纸基电路具有良好的散热功能。实验显示,在液态金属基纸基电路工作的LED灯相对于纯纸表面的LED灯温度有显著降低。该工作为发展绿色可回收的柔性电路提供了新的方法,成果发表在了Advanced Materials Technologies(Adv. Mater. Technol. 2018, 1800131)上。
(三)数字化的柔性触觉传感器
让假肢产生触觉是众多残疾人的梦想,而电子皮肤正是这样一种可以让人体假肢产生触觉的系统。但大多数的电子皮肤只能将外力刺激转换成模拟信号,无法像人体皮肤一样将外力刺激转换成生理脉冲,并精确地传送给神经系统直至大脑。针对这一问题,博士生巫远招、刘宜伟副研究员和李润伟研究员巧妙地采用电感-电容(LC)振荡机理设计电路(如图3a),当外界应力/应变引起电感值发生变化时,LC电路的频率就会发生变化,从而获得外加应力/应变与频率的对应关系,进一步通过优化LC共振电路,便可使其工作在人体的生理脉冲频率范围内。此外,还设计了“Air gap”结构(如图3a),采用非晶丝作为磁芯提高其性能,获得了灵敏度为4.4kPa-1、探测极限为10μN(相当于0.3Pa)的数字化柔性触觉传感器件(如图3b),并且通过优化传感器的模量和结构,可以兼容宽的探测范围,既可感知微弱的蚊虫和脉搏,亦可以感知搬举重物时的压力。该工作为发展数字化仿生电子皮肤提供了一种新的方法。该成果发表在了《科学》子刊Science Robotics(Sci. Robot. 2018, 3, eaat0429)上。
上述工作得到了国家杰出青年科学基金(51525103)、科技部中日政府间国际合作项目(2016YFE0126700)、国家自然科学基金(61704177, 11474295, 61774161)和宁波市创新团队(2015B11001)等项目支持。
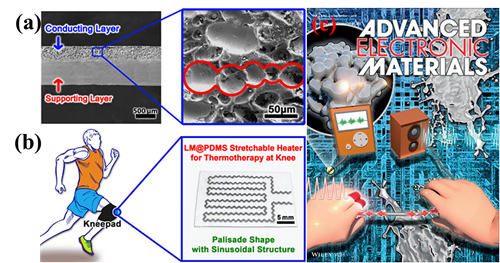
图1 (a)具有葫芦串导电网络结构的液态金属可拉伸导体;(b)基于液态金属可拉伸导体的弹性加热片;(c)论文封面

图2 用回收前后液态金属制备的电路性能对比
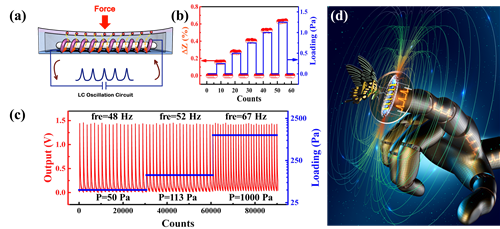
图3 (a)数字化柔性触觉传感器的原理图;(b)传感器分辨0.3Pa的微压力;(c)器件随压力改变的脉冲响应;(d)器件示意图
(磁材事业部 巫远招、郁哲、李法利) |




