智能化、类人化、柔性化是未来机器人发展的重要趋势。人形机器人,尤其是具备人工智能算法功能的人形机器人,不仅可以在日常生活中用于个人协助和护理,而且可以在危险任务中用于搜索和救援等。机器人的感知系统能够从外界收集数据,并根据外界环境的变化做出不同的响应,这对于提高机器人的服务质量和寿命是至关重要的。其中,痛觉感受器是一类重要的传感器,它可以识别来自于外界温度、压力等极端条件的潜在危险,并产生预警信号(动作电位)传递到中枢神经系统,从而触发保护反射动作规避一些伤害,将潜在的物理伤害降至最低。 对于触觉系统,当外界施加有害压力时,人体皮肤内的痛觉感知系统能够及时检测到有害刺激,并指导人体做出进一步的规避条件反应。这种保护机制并不是简单的反馈调节,而是由神经中枢控制形成的具有多种工作模式的智能机制。对于视觉系统,到达视网膜的可见光是产生视觉感知所必不可少的,但是其中超过伤害阈值的光线很容易对眼睛造成损害。人眼的光痛觉传感器在保护视觉系统免受光损伤的过程中发挥了关键作用,强光可以诱导眼睛发生眼睑闭合、瞳孔收缩等保护性自主反射,防止视网膜损伤。对于未来人形机器人的精密电子皮肤和视觉系统,我们有必要发展出一套仿生的痛觉感知器件和系统,在提高其服务质量和寿命的同时,形成更加友好的人机交互。 最近,中国科学院宁波材料技术与工程研究所李润伟研究团队围绕仿生痛觉传感器开展了系列研究工作。首先,选用高功函数的导电金属Pt作为底电极,选用富含缺陷的光敏半导体CeO2-x作为介质层,选用低功函数的透明导电材料ITO作为顶电极,构建了Pt/CeO2-x/ITO的“三明治”器件结构。该器件直接以可见光作为输入信号,具有与人眼光痛觉传感器高度相似的工作方式。测试结果表明,由于上下电极功函数不匹配所产生的内建电场,可以使器件在自供电模式下进行工作。通过改变外加光脉冲的强度、持续时间和频率,利用光生载流子在介质层缺陷态中的捕获和释放过程,可以在单个器件单元中实现痛觉传感器的四大关键属性,即阈值、非适应、弛豫和痛觉敏化。此外,由于人眼感受的主要是相对亮度,在不同的亮度背景下,光痛觉传感器的伤害阈值大小不同(如图1所示)。实验发现,当在顶电极与底电极之间施加外加电压并进行光照时,通过调节外加电压的方向与大小,可以实现对器件伤害阈值的调控。相关结果为构建智能视觉假体,人造眼球以及类人机器人等提供了材料和技术储备,近日发表在Nanoscale期刊上(A visible light-triggered artificial photonic nociceptor with adaptive tunability of threshold,https://pubs.rsc.org/en/content/articlehtml/2021/nr/d0nr07297d),并申请国家发明专利1项(一种仿生光痛觉传感器及其应用,202010498960.0)。 电子皮肤的痛觉感知能力赋予了其在复杂现实环境中工作的能力。受人体皮肤痛觉感知系统的启发,该团队采用仿生设计,制备了能够像人体一样具有多种工作模式的痛觉感知系统,为电子皮肤提供有效的保护。首先利用液态金属颗粒膜“受伤”(机械刻划)时独特的电学特性,仿制了能够实现“伤口”感知和定位的痛觉感受器,进一步结合压力传感器和仿神经突触,实现了痛觉的多种工作模式,包括受伤前基于压力传感器实现了伤害性信号的预警、受伤时的精确定位功能,受伤后通过调整仿神经突触的电阻状态实现了敏化机制的模拟,该机制也可以像人体受伤后的皮肤一样使得伤口周围的敏感性增强,轻微的触摸就可以引发疼痛信号的产生,因此可以有效促进伤口的修复和规避二次伤害。最后利用仿神经突触电阻信号的时间衰变特性,模仿了敏化机制的衰减(如图2所示)。 上述工作以“Bio-inspired multi-mode pain-perceptual system (MMPPS) with noxious stimuli warning, damage localization and enhanced damage protection”为题发表在Advanced Science上(DOI: 10.1002/advs.202004208)。该工作首次实现了对人体痛觉感知机制比较全面的模仿,未来有望集成在电子皮肤上同时实现痛觉感知、损伤预警和伤口修复的功能。 上述工作得到国家重点研发计划、国家自然科学基金、浙江省自然科学基金、宁波市科技创新团队以及宁波市自然科学基金等项目资助。 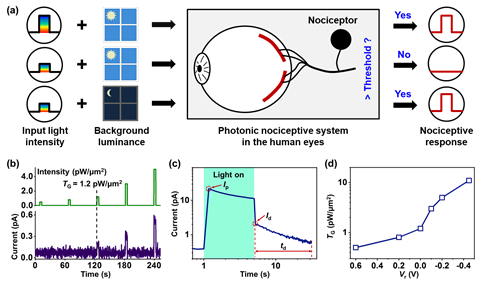
图1 (a)人眼光痛觉系统的工作原理示意图;(b) Pt/CeO2-x/ITO器件的阈值特性;(c)Pt/CeO2-x/ITO器件的弛豫特性;(d)阈值调节特性 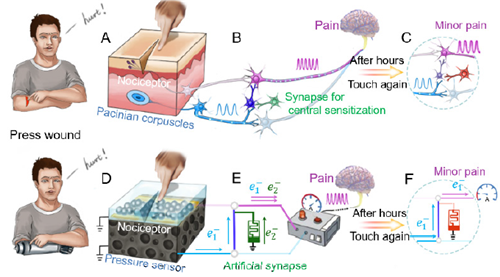
图2 (A-C)人体的痛觉感知系统的工作机理示意图,(D-F)仿生痛觉传感系统的工作机理示意图 (中科院磁性材料与器件重点实验室 李法利 公国栋) |




